Projects
Projects at Software Engineering at RWTH Aachen, Bernhard Rumpe
The explanations below will give you an overview over some recent and major research projects our chair is or has recently been part of. All our project results are aggregated to research topics on our research website.
- Agile Data Development
- AMoBaCoD - Angewandtes Modell Basiertes Co-Development für zeroE Flugzeugsysteme
- AutoKnigge
- BEST Energy
- The CarOLO Project on Autonomous Driving
- Collaborative Embedded Systems (CrESt)
- EmbeddedMontiArc
- Featured Composition of Model-based Analyses for Software-intensive Systems
- Human Brain Project (HBP)
- Intelligente modulare Serviceroboter-Funktionalitäten im menschlichen Umfeld am Beispiel von Krankenhäusern (iserveU)
- Interaktive, visuelle Datenräume zur souveränen, datenschutzrechtlichen Entscheidungsfindung (InviDas)
- Internet of Production (IoP)
- Künstliche Intelligenz als Schlüsseltechnologie für das Fahrzeug der Zukunft
- Management Cockpit for University Chair Controlling (MaCoCo)
- Model-Based DevOps (MBDO)
- Modelling Solution for Complex Software Systems (ModelPlex)
- MontiBelle - Intelligent Verification
- The MontiCore Language Workbench
- MontiCore-based Generator framework for Enterprise Management (MontiGem)
- NFDI Cooperations
- A Semantic Approach to Evolution Analysis in Model-Based Software Development (Semantic Diff)
- SensorCloud, a BMBF Trusted Cloud Computing project
- Software Plattform Embedded Systems (SPES 2020 / SPES XT)
- SysML Workbench for the SPES Method (SpesML)
![]()
Agile Data Development
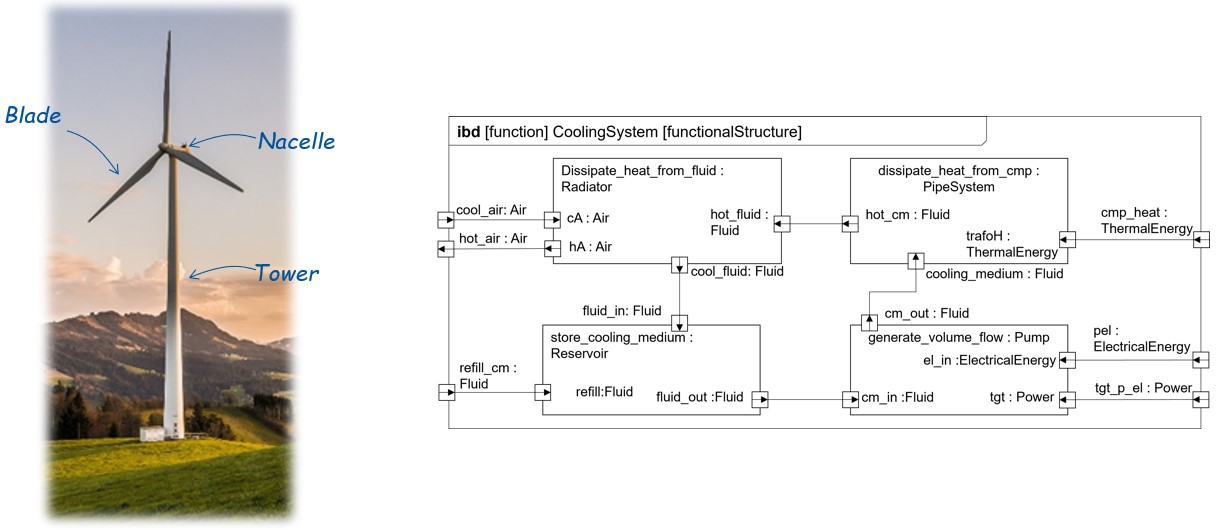
In cooperation with the WZL, MSE and Bewind as industrial partner, the goal of this project is to develop a guideline in the sense of a procedure description for the implementation of an agile development process by integrating agile and plan-driven methods as well as their data-based support. Thus, the project aims at (1) an increase of effectiveness by a targeted addressing of requirements in the sense of the agile idea shall be achieved, (2) an improvement of efficiency by avoiding unwanted iterations due to improved data transparency shall be supported, (3) a data-based decision support by an integrated data and system architecture shall be enabled and (4) a reduction of time-to-market with a simultaneous increase of market.
This approach is thus intended to increase the overall profitability of the windmill portfolio in the medium to long term. In addition, the approach focuses on efficiency gains in the development of new plants as well as improvements in the costs of parts, components and modules used across projects.
Selected publications
-
[BGK+24]In: Science of Computer Programming, Volume 232, pp. 103033, DOI 10.1016/j.scico.2023.103033, Elsevier, Jan. 2024.
-
[MNN+22]In: Modellierung 2022, pp. 33-48, DOI 10.18420/modellierung2022-012, Gesellschaft für Informatik e.V., Jun. 2022.
- Project is embedded in MontiGem - Generating Enterprise Management Systems
![]()
AMoBaCoD - Angewandtes Modell Basiertes Co-Development für zeroE Flugzeugsysteme
AIRBUS is planning to contribute to achieving the goals of the Paris Climate Agreement in context of their zero-emission initiative by developing the first climate-neutral products in 2035.
To this end, the main goals of this project are:
- Building a distributed work environment for the cooperative model-based development of future zero-emission aircraft programs.
- Joint development of a concrete scaled Airplane carrying all important requirements and performance parameters of real aircraft development as an exemplary validation and verification of the working environment for future zero-emission projects.

Selected publications
-
[KPR+25b]In: Journal of Aerospace Information Systems (JAIS), Volume 22(5), pp. 367-378, DOI 10.2514/1.I011476, American Institute of Aeronautics and Astronautics (AIAA), Reston, VA, USA, May 2025.
-
[KPR+25a]In: Council of European Aerospace Societies Aeronautical Journal (CEAS, Volume 16(1), pp. 33-48, DOI 10.1007/s13272-024-00762-6, Springer, Jan. 2025.
-
[KKN+24]In: Deutscher Luft- und Raumfahrtkongress (DLRK 2024), DOI 10.25967/630489, Deutsche Gesellschaft für Luft- und Raumfahrt - Lilienthal-Oberth e.V., Oct. 2024.
- Project is embedded in Artifacts in Complex Development Projects, Semantics of Modeling Languages, and State-Based Modeling (Automata)
![]()
AutoKnigge
AutoKnigge is a subproject of the second phase of the DFG SPP1835 program on the research of interactively cooperating vehicles. The focus of the first phase, in the predecessor project RapidCoop, was on the concept of local traffic systems (LTS), which are ad-hoc networks for vehicular cooperation, and an architecture-centric, dynamic modeling methodology for the design of such systems. In AutoKnigge, a dynamic framework specifying vehicle behavior is to be developed. The vehicles ought to be able to select appropriate behavioral patterns based on a situation and hence, to perform corresponding cooperative maneuvers. Furthermore, a set of behavioral rules is to be defined which serves as a guidelines catalogue for cooperative vehicles.
Selected publications AutoKnigge, cf. EMA and MontiSim publications, as well
-
[KKR19]In: Journal of Object Technology (JOT), B. Combemale, S. Ali (Eds.), Volume 18(2), pp. 1-20, DOI 10.5381/jot.2019.18.2.a2, AITO - Association Internationale pour les Technologies Objets, Jul. 2019.
-
[KPRS19]In: ASE19. Software Engineering Intelligence Workshop (SEI19), L. O’Conner (Eds.), pp. 126-133, DOI 10.1109/ASEW.2019.00042, IEEE, Nov. 2019.
-
[KKMR19]In: Proceedings of MODELS 2019. Workshop MLE, L. Burgueño, A. Pretschner, S. Voss, M. Chaudron, J. Kienzle, M. Völter, S. Gérard, M. Zahedi, E. Bousse, A. Rensink, F. Polack, G. Engels, G. Kappel (Eds.), pp. 331-338, IEEE, Sep. 2019.
- Project is embedded in Autonomous Driving & Intelligent Driver Assistance and Automotive
![]()
BEST Energy
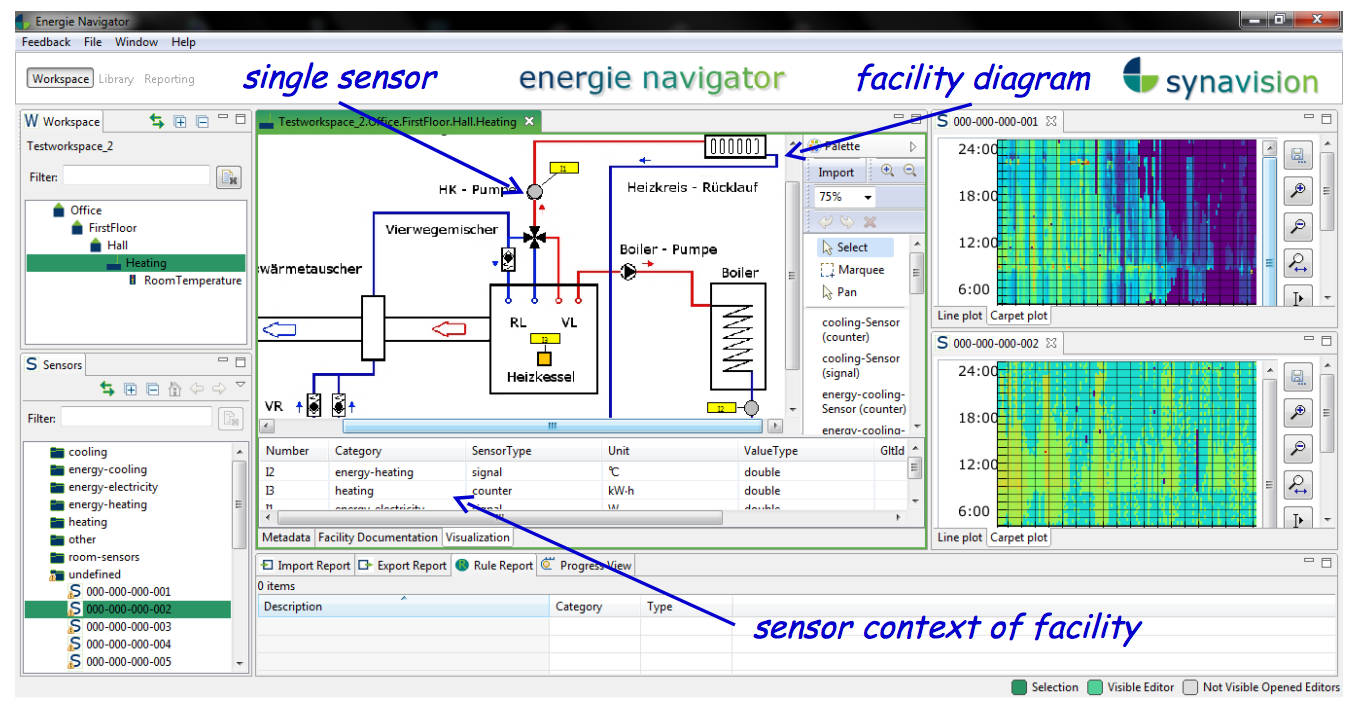
BEST Energy is a project to improve the energy efficiency in buildings, which project belongs to the ICT Policy Support Programme. The main objective of this project was to improve the energy efficiency in public buildings and street public lighting, by the ICT-based centralized monitoring and management of the energy consumption and production, and to provide decision makers with the necessary tools to be able to plan energy saving measures. To achieve this objective BEST Energy project did implement and validate four pilots, two related to energy efficiency in public buildings (one in a Sports centre in Spain and one in a University building in Germany), and another two regarding energy efficiency in public street lighting. The pilots implement innovative advanced control mechanisms allowing to substantially improve the energy efficiency in the respective buildings and spaces.
The Synavision GmbH is an offspring of these activities.
- Project is embedded in Smart Energy Management
![]()
The CarOLO Project on Autonomous Driving
In the context of the CarOLO project, we developed Caroline already at the TU Braunschweig. Caroline is a fully autonomous car, which allowed us to take part in the Darpa Urban Challenge. Caroline managed to win 7th place, was the best newcomer in the competition and our chair became the best non-american team (see also Darpa Grand Challenge).
Selected publications
-
[BR09a]In: Proceedings INFORMATIK 2009. GI Edition - Lecture Notes in Informatics (LNI), Band P154, 7. Workshop Automotive Software Engineering, 2009.
-
[BR12b]In: Automotive Software Engineering Workshop (ASE’12), pp. 789-798, 2012.
-
[BR12]In: Experience from the DARPA Urban Challenge, C. Rouff, M. Hinchey (Eds.), pp. 243-271, Springer, Germany, 2012.

- Project is embedded in Autonomous Driving & Intelligent Driver Assistance and Automotive
![]()
Collaborative Embedded Systems (CrESt)
In the CrESt research project, 23 partners from industry and research investigated how to reliably engineer the software of the future’s smart, distributed CPS. We investigated modeling techniques, methods, and processes to manage the complexity of engineering software for dynamically coupled, automated CPS. Our main contributions focus on tool integration and artifact-based analysis, language variability, and evolution of software product line architectures. The project was funded by the German Federal Ministry for Education and Research (BMBF).
Selected publications
-
[KRSW20]In: International Working Conference on Variability Modelling of Software-Intensive Systems, M. Cordy, M. Acher, D. Beuche, G. Saake (Eds.), ACM, Feb. 2020.
-
[BEK+19]In: Journal of Systems and Software (JSS), R. C. Sevilla, L. Fuentes, M. Lochau (Eds.), Volume 152, pp. 50-69, DOI 10.1016/j.jss.2019.02.026, Elsevier, Jun. 2019.
-
[BEK+18b]In: International Conference on Systems and Software Product Line (SPLC’18), ACM, Sep. 2018.
-
[BGRW18]In: Software Technologies: Applications and Foundations, M. Seidl, S. Zschaler (Eds.), pp. 146-153, LNCS 10748, Springer, Jan. 2018.

- Project is embedded in various areas including Model-Driven Systems Engineering, Variability & Software Product Lines (SPL), Semantics of Modeling Languages, Modeling Software Architecture, and MontiArc - Architectural Modeling.
![]()
EmbeddedMontiArc
EmbeddedMontiArc is an architecture-centric component-based modeling methodology focusing on automotive software and cyber-physical systems engineering. Its elaborate type system supporting SI units, a math oriented behaviour description language, as well as compact syntax for the instantiation and interconnection of large systems enables developers to focus on functionality rather than on annoying technical details. The EmbeddedMontiArc compiler produces high-performance executable code and generates interfaces to middleware solutions such as ROS. What’s more, EmbeddedMontiArcDL supports the design of intelligent systems by providing a dedicated and easy-to-learn neural network modeling and training language. The models can be executed and validated in MontiSim, our distributed and service-oriented simulator for autonomous, interactively collaborative vehicles.
See more about EmbeddedMontiArc in our video playlists:
- EmbeddedMontiArc: C&C Modeling and Simulation for Embedded Systems
- Case Study Videos for “Highly-Optimizing and Multi-Target Compiler for Embedded System Models”
Selected publications EmbeddedMontiArc
-
[KNP+19]In: Conference on Model Driven Engineering Languages and Systems (MODELS’19), M. Kessentini, T. Yue, A. Pretschner, S. Voss, L. Burgueño (Eds.), pp. 283-293, IEEE, Sep. 2019.
-
[KRS+18a]In: Conference on Model Driven Engineering Languages and Systems (MODELS’18), pp. 447 - 457, ACM, Oct. 2018.
-
[KRRW17]In: European Conference on Modelling Foundations and Applications (ECMFA’17), pp. 34-50, LNCS 10376, Springer, Jul. 2017.
Selected Publications MontiSim
-
[KKRZ19]In: Proceedings of MODELS 2019. Workshop MASE, L. Burgueño, A. Pretschner, S. Voss, M. Chaudron, J. Kienzle, M. Völter, S. Gérard, M. Zahedi, E. Bousse, A. Rensink, F. Polack, G. Engels, G. Kappel (Eds.), pp. 28-37, IEEE, Sep. 2019.
-
[FIK+18]In: International Conference on Intelligent Transportation Systems (ITSC’18), pp. 596-601, IEEE, 2018.

- Project is embedded in Artificial Intelligence in Software Engineering, Modeling Software Architecture, State-Based Modeling (Automata), Domain-Specific Languages (DSLs), and MontiArc - Architectural Modeling
![]()
Featured Composition of Model-based Analyses for Software-intensive Systems (FeCoMASS)
The FeCoMASS Project is a DFG-funded project carried out in cooperation with Robert Heinrich of KIT. Its aim is to enhance compositional analysis techniques for model-driven engineering. Compositional analysis involves breaking down a system into smaller components and analyzing them individually to gain a better understanding of the overall system behavior. This approach is crucial because as systems become more heterogeneous and complex, traditional analysis techniques may not be sufficient to accurately assess their performance and behavior. By decomposing the system and analyzing its components separately, we can ensure sound analysis results and also enable the flexible use and reuse of model-based analyses.
For this purpose, we will investigate:
-
(de)compositional semantics for modelling languages and analysis techniques to ensure sound analysis results,
-
concepts and guidelines for flexible use and reuse of model-based analyses, and
-
foundations for easily configurable constructions of model-based analyses.
Selected publications
-
[KRW+23]Karlsruher Institut für Technologie (KIT), Technical Report, Volume 2023(2), Karlsruhe Reports in Informatics, DOI 10.5445/IR/1000161276, Aug. 2023.
-
[WHT+24]In: Software Architecture. ECSA 2024 Tracks and Workshops, A. Ampatzoglou, J. Pérez, B. Buhnova, V. Lenarduzzi, C. C. Venters, U. Zdun, K. Drira, L. Rebelo, D. Di Pompeo, M. Tucci, E. Y. Nakagawa, E. Navarro (Eds.), Volume 14937, pp. 30-38, LNCS, DOI 10.1007/978-3-031-71246-3_4, Springer Nature Switzerland, Cham, Sep. 2024.
- Project is embedded in Semantics of Modeling Languages and Domain-Specific Languages (DSLs).
![]()
Human Brain Project (HBP)
The Human Brain Project is a H2020 FET flagship project that strives to accelerate the fields of neuroscience, computing and brain-related medicine. In this project, conceive and contributed the NESTML modelling language for neuronal behavior.
Selected publications
-
[BPEM18]In: Journal Frontiers in Neuroinformatics, Volume 12, 2018.
-
[BEM+18]DOI 10.5281/zenodo.1319653, Zenodo, Jul. 2018.
-
[Plo18]Aachener Informatik-Berichte, Software Engineering, Band 33, ISBN 978-3-8440-5779-9, Shaker Verlag, Feb. 2018.
-
[PBI+16]In: Modellierung 2016 Conference, Volume 254, pp. 93-108, LNI, Bonner Köllen Verlag, Mar. 2016.

- Project is embedded in Software Language Engineering (SLE) and Domain-Specific Languages (DSLs).
![]()
Intelligente modulare Serviceroboter-Funktionalitäten im menschlichen Umfeld am Beispiel von Krankenhäusern (iserveU)
In iserveU, we explore model-driven engineering methods for service robotics applications in dynamic environments with a consortium of three companies and four universities. We develop a family of integrated MontiCore modeling languages to describe, plan, and execute robotics tasks without in-depth programming expertise. Models of these languages are used by a MontiArc software architecture which integrated robotics middlewares to, ultimately, operate service robots in a German hospital. The project is funded by the German Federal Ministry for Education and Research (BMBF). Additional materials can be found at our iserveU Materials Website.
Selected publications
-
[HNR+15]In: Intelligent Robots and Systems Conference (IROS’15), pp. 1793-1798, IEEE, 2015.
-
[ABH+16]In: International Workshop on Domain-Specific Modeling (DSM’16), pp. 22-27, ACM, Oct. 2016.
-
[ABK+17]In: Proceedings of MODELS 2017. Workshop EXE, CEUR 2019, Sep. 2017.

- Project is embedded in Robotics Architectures and Tasks and MontiArc - Architectural Modeling.
![]()
Interaktive, visuelle Datenräume zur souveränen, datenschutzrechtlichen Entscheidungsfindung (InviDas)
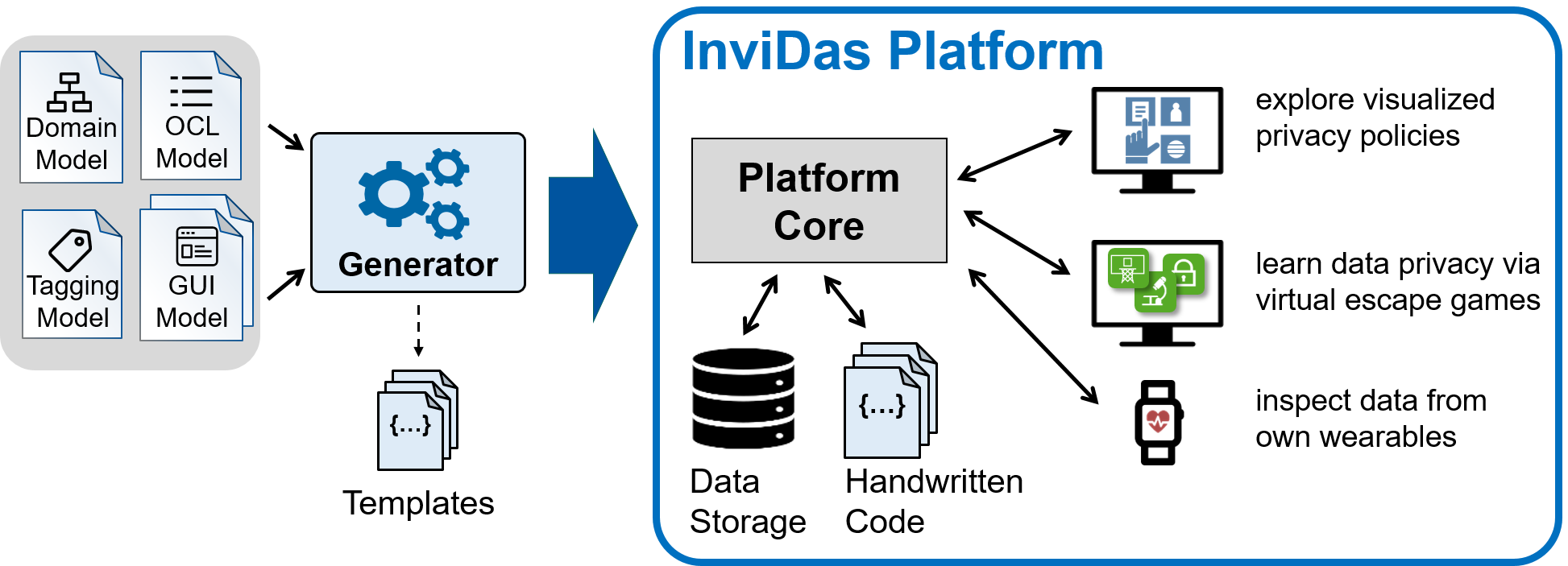
Many people are increasingly surrounded by digital technologies and applications that collect, process and share personal data. At the same time, few read and understand the often long and complicated privacy statements of their individual devices and applications. Within the InviDas project, we ensure that users of smart wearables, such as fitness watches, will in future have better insight into their data profiles and will thus be able to make informed decisions more easily. New forms of data visualization and gamification are being researched, with which both manufacturers and users can make data privacy declarations more comprehensible and transparent. The project is funded by the BMBF.
The InviDas project is jointly realized by the Gesellschaft für Informatik e.V., Stiftung Digitale Chancen, Garmin Würzburg GmbH, RWTH Aachen University (Software Engineering, Chair and Institute of Industrial Engineering and Ergonomics and Applied Ethics), Universität Bremen and Otto-Friedrich Universität Bamberg.
Selected publications
-
[BGK+24]In: Science of Computer Programming, Volume 232, pp. 103033, DOI 10.1016/j.scico.2023.103033, Elsevier, Jan. 2024.
- Project is embedded in Model-Based Assistive Systems, Cloud Computing Applications, Enterprise Information Systems, and MontiGem - Generating Enterprise Management Systems
![]()
Internet of Production (IoP)
The Internet – in its meaning of a worldwide socio-technical network – has revolutionized accessibility of data and knowledge. This idea has been transferred to the physical world with the concept of the Internet of Things (IoT). A direct application of the IoT approach to production is currently not sufficiently feasible. There are many more parameters but much less available data than other big data application domains. Vast amounts of data characterize modern production. However, this data is neither easily accessible, interpretable, nor connected to gain knowledge.
Within the DFG Cluster of Excellence Internet of Production
(IoP), we
enable a new level of cross-domain collaboration by providing
semantically adequate and context-aware data from production,
development, and usage in real-time on an appropriate level of
granularity. The central scientific approach is the introduction of
Digital Twins and Digital Shadows. We
design and implement a conceptual reference infrastructure for the
IoP that enables the generation and application of
Digital Shadows.
Selected publications
-
[BDJ+22]In: Journal ACM Transactions on Internet of Things, Volume 3, pp. 1-32, DOI 10.1145/3502265, ACM, Feb. 2022.
-
[MKD+23]In: Internet of Production: Fundamentals, Applications and Proceedings, C. Brecher, G. Schuh, W. van der Aalst, M. Jarke, F. T. Piller, M. Padberg (Eds.), pp. 1–28, DOI 10.1007/978-3-030-98062-7_3-2, Springer, Jun. 2023.
-
[BBD+21b]In: Conceptual Modeling, ER 2021, A. Ghose, J. Horkoff, V. E. Silva Souza, J. Parsons, J. Evermann (Eds.), pp. 271-281, Springer, Oct. 2021.
-
[BDH+20]In: International Conference on Advanced Information Systems Engineering (CAiSE’20), S. Dustdar, E. Yu, C. Salinesi, D. Rieu, V. Pant (Eds.), Volume 12127, pp. 85-100, Lecture Notes in Computer Science, Springer International Publishing, Jun. 2020.
-
[DJM+19]Towards Sustainable Systems Engineering-Integrating Tools via Component and Connector Architectures.In: Antriebstechnisches Kolloquium 2019: Tagungsband zur Konferenz, G. Jacobs, J. Marheineke (Eds.), pp. 121-133, Books on Demand, Feb. 2019.
- Project is embedded in Model-Driven Systems Engineering, Digital Twins and Digital Shadows in Engineering, Operation and Production, MontiGem - Generating Enterprise Management Systems.
![]()
Künstliche Intelligenz im Ziele- und Anforderungsmanagement (KIZAM)
The (KIZAM)(https://kizam.de/) project focuses on the analysis of natural language requirements from the automotive sector. Sets of requirements are processed and checked for consistency and redundancy by leveraging NLP-techniques, large language models and smt-solving. The project is funded by the Federal Ministry of Economics and Climate Protection (BMWi).
The aim of the (KIZAM)(https://kizam.de/) project is to research the use of AI methods in requirements management in vehicle development in order to make machine-readable, optimized and consistent requirements available in vehicle development. This is done with the help of customized software solutions and AI algorithms that build on existing systems and solutions and can be adapted quickly and easily if the project is successful. In addition, the use of AI in requirements management also enables the fast and efficient comparison of all relevant requirements data and recognizes interactions across requirements levels, process interfaces and system boundaries, which significantly increases the quality of the requirements catalog.

![]()
Management Cockpit for University Chair Controlling (MaCoCo)
Within the MaCoCo (Management Cockpit for Controlling) project we realize a multi-user enterprise information system for the decentralized management and controlling of organizational processes within the chairs or institutes of a university. The key elements of the project focus on finance, staff and project organization.
Large parts of the code are generated with the MontiCore language workbench and code generation framework to ensure a highly adaptable system. Lead users are involved actively in the development process to be able to provide a useful solution.
The MaCoCo project is funded by the RWTH Aachen University and jointly realized by the two Chairs of Management Accounting and Software Engineering.

Selected publications
-
[BGK+24]In: Science of Computer Programming, Volume 232, pp. 103033, DOI 10.1016/j.scico.2023.103033, Elsevier, Jan. 2024.
-
[GHK+20]In: Companion Proceedings of Modellierung 2020 Short, Workshop and Tools & Demo Papers, J. Michael, D. Bork (Eds.), pp. 22-30, CEUR Workshop Proceedings, Feb. 2020.
- Project is embedded in Cloud Computing Applications, Enterprise Information Systems, and MontiGem - Generating Enterprise Management Systems
![]()
Model-Based DevOps (MBDO)
MBDO provides the foundations for a Model-Based DevOps framework unifying different forms of models for cloud-native and IoT systems. The Model-Based DevOps framework allows engineers to smoothly go back and forth from Dev time to Ops time by leveraging semi-automatically generated digital twins of their systems.
Selected publications
-
[CJJ+23]In: Model-Driven Engineering for Digital Twins Workshop of the 2023 ACM/IEEE International Conference on Model Driven Engineering Languages and Systems Companion (MoDDiT), D. Di Ruscio, L. Lambers (Eds.), pp. 429-433, DOI 10.1109/MODELS-C59198.2023.00076, IEEE, Västerås, Sweden, Oct. 2023.
- Project is embedded in Cloud Computing Applications, Internet of Things, Digital Twins, and MontiGem - Generating Enterprise Management Systems
![]()
Modelling Solution for Complex Software Systems (ModelPlex)
The three major objectives of ModelPlex are to develop an open solution for complex systems engineering improving quality and productivity, lead its industrialisation and ensure its successful adoption by the industry.
- Project is embedded in Software Language Engineering (SLE), Domain-Specific Languages (DSLs), and MontiCore - Language Workbench for DSLs.
![]()
MontiBelle - Intelligent Verification
Based on a well-established mathematical dataflow-theory, we apply logic, knowledge representation and intelligent reasoning to software engineering to perform correctness proofs, execute symbolic tests or find counterexamples. The theorem prover Isabelle is a mature and fundamental tool, which allows representing knowledge as a collection of definitions and theorems and reason about systems. To increase the usability we provide a high-level API encapsulating the low-level logic engine as well as a domain-specific modeling language as front end coupled with an Isabelle code generator.
Playlist: MontiBelle - Interactive Verificaton made Powerful
- Verified Design of Safety-Critical Cyber-Physical Avionics Systems with the MontiBelle Framework
- Vehicle Feature Interaction Verification at the Push of a Button
- Model-Based Development and Logical AI for Secure and Safe Avionics Systems

These and the rapid increase of computation capabilities suggest that a prominent application for reducing certification costs of critical systems such as intelligent flight control systems or assistance systems for air or road traffic management is not far in the future.
Selected publications
-
[KPR+25b]In: Journal of Aerospace Information Systems (JAIS), Volume 22(5), pp. 367-378, DOI 10.2514/1.I011476, American Institute of Aeronautics and Astronautics (AIAA), Reston, VA, USA, May 2025.
-
[KPR+25a]In: Council of European Aerospace Societies Aeronautical Journal (CEAS, Volume 16(1), pp. 33-48, DOI 10.1007/s13272-024-00762-6, Springer, Jan. 2025.
- Project is embedded in Artifacts in Complex Development Projects, Semantics of Modeling Languages, and State-Based Modeling (Automata)
![]()
The MontiCore Language Workbench
MontiCore is a language workbench for an efficient development of domain-specific languages (DSLs). It processes an extended grammar format which defines the DSL and generates Java components for processing the DSL documents. Examples for these components are parser, AST classes, symboltables or visitors. This enables a user to rapidly define a language and use it together with the MontiCore-framework to build domain specific tools. Some MontiCore advantages are the reusability of predefined language components, conservative extension and composition mechanisms and an optimal integration of hand-written code into the generated tools. MontiCore enables the research of model-based software development methods employing a variety of DSLs and modeling languages. On top of this, MontiCore and its DSL products are successfully in use in academic and industrial research projects in various domains such as automotive software modeling, cloud architecture and security modeling, model-based robotics, smart energy management, neural network modeling. The design rationale of MontiCore is to provide a powerful and efficient workbench for the agile creation of DSLs along with their accompanying infrastructure such as analyses, transformations, and code generators.
MontiCore features:
-
Combined specification of concrete and abstract syntax in a context-free grammar
-
Customizable generation of parser and abstract syntax tree
-
Generation of analysis infrastructure including visitors
-
Adaptable grammar processing via interpreted Groovy scripts
-
Configurable logging and process reporting
-
Freemarker Template Engine for easy code generation
DSLs created with MontiCore:
-
Unified Modeling Language for Programming (UML/P)
- MontiArc Architecture Description Language (ADL) and languages based
on it such as
- MontiArcAutomaton - ADL with automaton behavior specification
- clArc - Cloud ADL Family
- MontiSecArc - ADL with security constraints
- EmbeddedMontiArc - ADL for automotive software and cyber-physical systems engineering
-
Aerospace Constraint Specification Language - DSL for the specification of significant air traffic scenarios
-
MontiTrans - Generator and Infrastructure for domain-specific transformation languages
-
GUIDSL - DSL to describe the layout of websites
-
A language to model restrictions in television broadcasts
- Java, Class Diagrams, Feature Diagrams, JSON, XML, OCL/P, Object Diagrams, Statecharts, and many more
There are many publications about MontiCore (see e.g. here). Especially the MontiCore Handbook contains a good summary of how to use MontiCore.
- This project is described in the topic MontiCore - Language Workbench for DSLs, but it provides the core tool infrastructure for many other language definitions and projects.
![]()
MontiCore-based Generator framework for Enterprise Management (MontiGem)
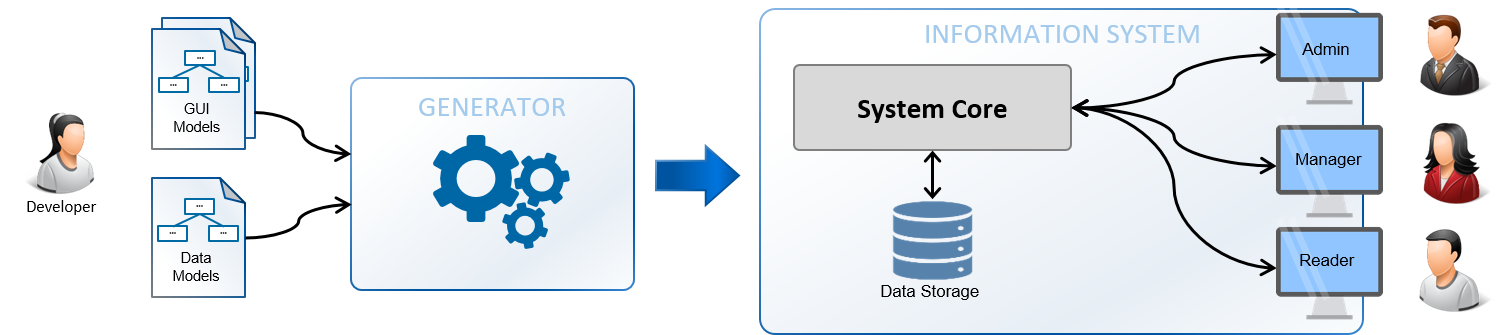
The MontiGem framework allows developers to generate large parts of a web application for a domain specific Enterprise Information System based on the input models and provides a runtime environment for such systems. The generated parts include: The database schema, the persistence layer (communication interface between applicationback-end and the database), the command infrastructure (communication interface between application front-end and back-end of the application) as well as between parts of the back-end, and graphical user interfaces.
See more about MontiGem in our video playlist: Gerating Information Systems with MontiGem
Selected publications
-
[GMN+20]In: 25th Americas Conference on Information Systems (AMCIS 2020), B. Anderson, J. Thatcher, R. Meservy (Eds.), pp. 1-10, AIS Electronic Library (AISeL), Association for Information Systems (AIS), Aug. 2020.
-
[AMN+20a]In: 40 Years EMISA: Digital Ecosystems of the Future: Methodology, Techniques and Applications (EMISA’19), Volume P-304, pp. 59-66, LNI, Gesellschaft für Informatik e.V., May 2020.
- This project is described in the topic MontiGem - Generating Enterprise Management Systems, but it provides the core tool infrastructure for many other projects.
![]()
NFDI Cooperations
The National Research Data Infrastructure (NFDI) is a collaborative initiative in Germany that aims to make research data accessible, networked, and usable. It is organized by a network of institutions, universities, research centers, and associations. NFDI’s primary goal is to systematically index, edit, interconnect, and provide access to valuable research data from science and research across various disciplines. The initiative consists of consortia, each representing specific domains and contributing to improved research data management according to the FAIR principles (findable, accessible, interoperable, and reusable).
NFDI4Ing
NFDI4Ing represents the German engineering research landscape. The consortium brings together institutions and individuals from all areas of the engineering landscape, each contributing their specific expertise, experience, and contacts to the consortium’s work program. NFDI4Ing adopts a unique method-oriented and user-centered approach to make engineering research data FAIR (findable, accessible, interoperable, and reusable). By doing so, it ensures that engineering data is effectively managed and utilized. The National Research Data Infrastructure (NFDI) initiative, jointly funded by the German government and the governments of the federal states, aims to systematically index, edit, interconnect, and make available the valuable stock of data from science and research. A central goal is to overcome existing challenges in research data management.
NFDIxCS
NFDIxCS is the Nationale Forschungsdateninfrastruktur für und mit Computer Science (National Research Data Infrastructure for and with Computer Science) in Germany. Its core goal is to identify, define, and deploy services for storing complex domain-specific data objects across various computer science disciplines. This includes creating reusable data objects containing not only different types of computer science data but also associated metadata, software, context, and execution information. NFDIxCS actively promotes the implementation of FAIR Data Principles for computer science research data and software artifacts. It provides a forum for discussing data formats, metadata, and semantics. Additionally, NFDIxCS collaborates with other scientific disciplines to apply computer science methods like Big Data, Artificial Intelligence, and Machine Learning. By sharing experiences and knowledge, NFDIxCS aims to build an interoperable infrastructure that harnesses the strengths of relevant services and actors within the field of computer science
![]()
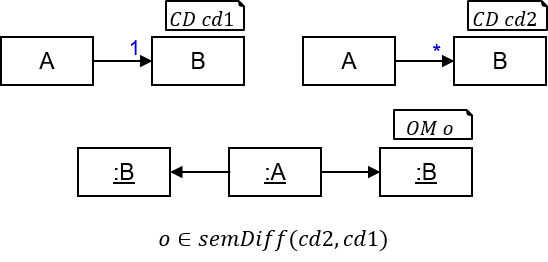
A Semantic Approach to Evolution Analysis in Model-Based Software Development (Semantic Diff)
The semantic difference from one model to another model contains the elements in the semantics of the former model that are no elements in the semantics of the latter model. Revealing the semantic differences from one model version to a successor model version facilitates to understand the semantic impact of the syntactic changes that have been applied to the original model version to obtain the successor model version. In these DFG projects, we develop semantic differencing methods for various concrete modeling languages and concrete modeling language-independent methods that facilitate solving semantic model evolution analysis problems.
Selected publications
-
[DKMR20]RWTH Aachen University, AIB-2020-05, Technical Report, May 2020.
-
[DKMR19]In: International Systems and Software Product Line Conference (SPLC’19), T. Berger, P. Collet, L. Duchien, T. Fogdal, P. Heymans, T. Kehrer, J. Martinez, R. Mazo, L. Montalvillo, C. Salinesi, X. Tërnava, T. Thüm, T. Ziadi (Eds.), pp. 245-255, ACM, Sep. 2019.
-
[BKRW19]In: Journal of Systems and Software (JSS), P. Pelliccione, J. Bosch, M. Marija (Eds.), Volume 149, pp. 437-461, DOI 10.1016/j.jss.2018.12.016, Elsevier, Mar. 2019.
-
[KR18a]In: Conference on Model Driven Engineering Languages and Systems (MODELS’18), pp. 289-299, ACM, Oct. 2018.
-
[BKRW17]In: International Conference on Software Architecture (ICSA’17), pp. 145-154, IEEE, Apr. 2017.
-
[MRR11d]In: Conference on Foundations of Software Engineering (ESEC/FSE ’11), pp. 179-189, ACM, 2011.
-
[MRR11b]In: ECOOP 2011 - Object-Oriented Programming, M. Mezini (Eds.), pp. 230-254, Springer Berlin Heidelberg, 2011.
-
[MRR10]In: Proceedings Int. Workshop on Models and Evolution (ME’10), pp. 194-203, LNCS 6627, Springer, 2010.
- Project is embedded in Semantics of Modeling Languages, Unified Modeling Language (UML), and Artificial Intelligence in Software Engineering.
![]()
SensorCloud, a BMBF Trusted Cloud Computing project
In Cloud Computing the user no longer owns all the devices which process personal data. To lower scepticism, the project SensorCloud investigates techniques to understand and compensate all adoption barriers in a scenario consisting of cloud applications that utilize sensors and actuators in private places. This project addresses the interdisciplinary, i.e. social and technical research challenges for the trustworthy integration of sensor and actuator devices with the Cloud Computing paradigm. Most importantly, these challenges include ease of development, security and privacy, and social dimensions of a cloud-based system which integrates into private life.
Selected publications
-
[HHK+15a]In: Journal Future Generation Computer Systems, Volume 56, pp. 701-718, Elsevier, 2015.
-
[HHK+14]In: Conference on Future Internet of Things and Cloud (FiCloud’14), IEEE, 2014.
-
[HPR13]In: Workshop Wissenschaftliche Ergebnisse der Trusted Cloud Initiative, pp. 125-140, Springer, Schweiz, 2013.

- Project is embedded in Cloud Computing Applications.
![]()
Software Plattform Embedded Systems (SPES 2020 / SPES XT)
SPES 2020 and SPES XT are two research project sponsored by the BMBF that aim to develop a methodology to realize a consistent modelbased development of embedded systems.
Selected publications
-
[RSW+15]In: Software Product Line Conference (SPLC’15), pp. 141-150, ACM, 2015.
-
[BMP+16]In: Modellierung 2016 Conference, Volume 254, pp. 109-116, LNI, Bonner Köllen Verlag, Mar. 2016.
-
[RSW16]In: GI Softwaretechnik-Trends, Volume 36(2), May 2016.

- Project is embedded in Domain-Specific Languages (DSLs), Unified Modeling Language (UML), State-Based Modeling (Automata), and Agile Model-Based Software Engineering.
![]()
SysML Workbench for the SPES Method (SpesML)
The Systems Modeling Language (SysML) is extensively used in practice as a modeling language by tool vendors and standardization organizations such as the OMG. The industrial introduction of model-based system engineering (MBSE) often consists only of using the SysML modeling language and simple drawing tools, without an appropriate semantic concept and a consistent development methodology. Existing, more advanced methods and tools are not directly applicable. Thus, the essential potentials of the methodology of integrated MBSE are not used. SPES provides a semantically based concept for MBSE with a set of methods.
This project aims to develop a SysML workbench for the SPES methodology and make it available for practical use. This workbench will support the SPES methods and models continuously to ensure the dissemination of MBSE, especially among small and medium-sized enterprises. Thus, the widely used modeling language SysML will be semantically and methodically substantiated and will pave the way to a comprehensive MBSE approach, especially for industry.
Selected publications
-
[DJRS22]In: Modellierung 2022 Satellite Events, pp. 32-43, Gesellschaft für Informatik e.V., Jun. 2022.
-
[GJRR22]In: Modellierung 2022 Satellite Events, pp. 61-76, Gesellschaft für Informatik e.V., Jun. 2022.
-
[KPR+22]In: 2022 IEEE/AIAA 41st Digital Avionics Systems Conference (DASC), IEEE, Sep. 2022.
- Project is embedded in Domain-Specific Languages (DSLs), Unified Modeling Language (UML), Semantics of Modeling Languages, State-Based Modeling (Automata), and Agile Model-Based Software Engineering.
![]()